
美国诺斯罗普·格鲁曼公司日前宣布,将发射一枚搭载服务机器人飞行器的“飞马座”火箭,对一颗即将因轨道衰减而坠入大气层的NASA空间天文台实施在轨“抢救”,这一行动被视为商业航天推进在轨服务与延寿的新里程碑。
这次任务的目标是自2004年11月起运行、已服役近22年的尼尔·盖尔斯·斯威夫特伽马暴观测卫星(Neil Gehrels Swift Observatory),该卫星通过观测伽马射线暴及其在X射线和紫外/可见光波段的余辉,为高能天体物理研究提供了大量关键数据,如今却因多年轨道衰减面临不可避免的大气层再入命运。

在过去的多数案例中,一旦这类科学卫星出现轨道高度持续下降、燃料耗尽等问题,相关机构往往只能无奈接受其在大气中烧毁的结局,一套仍可正常工作的“好卫星”就此报废。 随着运载火箭能力和空间机器人技术的快速发展,类似“无力回天”的情形正开始出现转机,在轨主动服务与延寿任务逐步从概念走向现实。
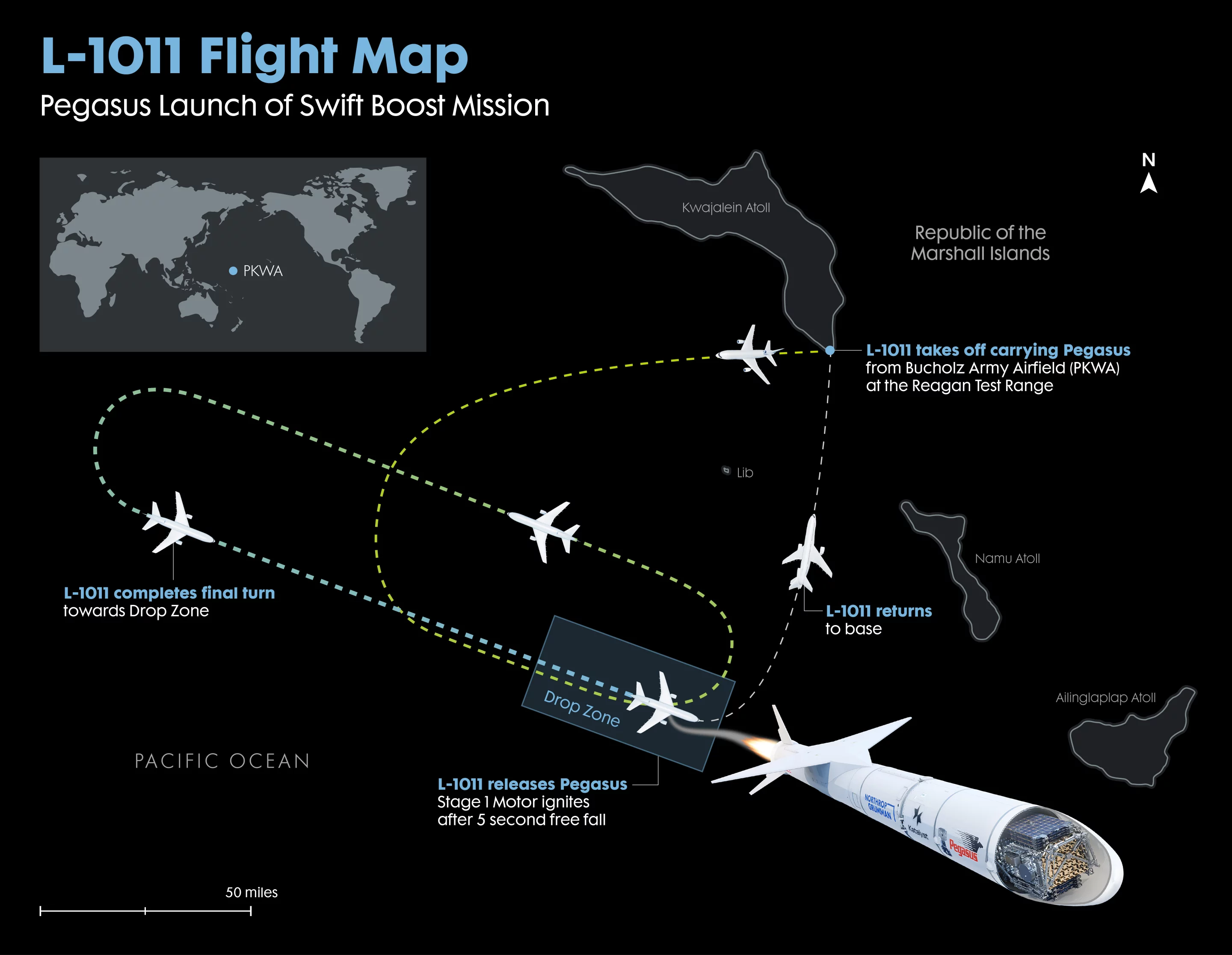
根据公布的任务方案,诺斯罗普·格鲁曼将使用一枚由L-1011“三星”Stargazer运输机空中投放的“飞马座”XL小型固体运载火箭,火箭整流罩中搭载由Katalyst Space Technologies研制、质量约400公斤的LINK服务飞行器。 运输机将在马绍尔群岛夸贾林环礁附近赤道海域上空释放火箭,飞马座点火后将LINK送入与斯威夫特几乎完全一致的轨道平面,其轨道倾角约为20.6度。


在与火箭上面级分离后,LINK将依靠自身推进系统逐步调整轨道,用数天甚至数周时间追赶目标卫星,直至在约每小时1.7万英里(约2.7万公里)的相对速度条件下完成轨道交会。 任务听起来简洁直接,但技术挑战极高:受限于测控链路信号往返的时延,救援飞行器在关键阶段必须高度依赖自主控制,实时处理来自光学相机、激光雷达测距传感器的观测数据,并由机载制导飞行软件和成像系统完成相对导航与姿态控制决策。


更棘手的是,斯威夫特卫星在设计之初并未预留任何外部维护或对接接口,既没有标准化的对接环,也缺乏磁性捕获装置或协同导航信标,其结构与表面状态在近二十年太空环境暴露后如何,也无先例可循。 因此,LINK需要先在近距离对目标卫星进行扫描评估,寻找当年用于地面转运和安装在“德尔塔”火箭上的地面吊装固定点,并据此规划抓取策略。
一旦找到合适的结构部位并确认安全,LINK将伸出三条外形颇为“骇人”的机械臂,牢牢抓住这些地面用固定装置,从而实现对斯威夫特的姿态与轨道控制接管。 随后,LINK将通过自身推进系统点火,将这颗天文台推升至约600公里高度的新轨道,使其再度获得“数年级”的安全在轨寿命,为后续高能天文观测赢得宝贵时间。
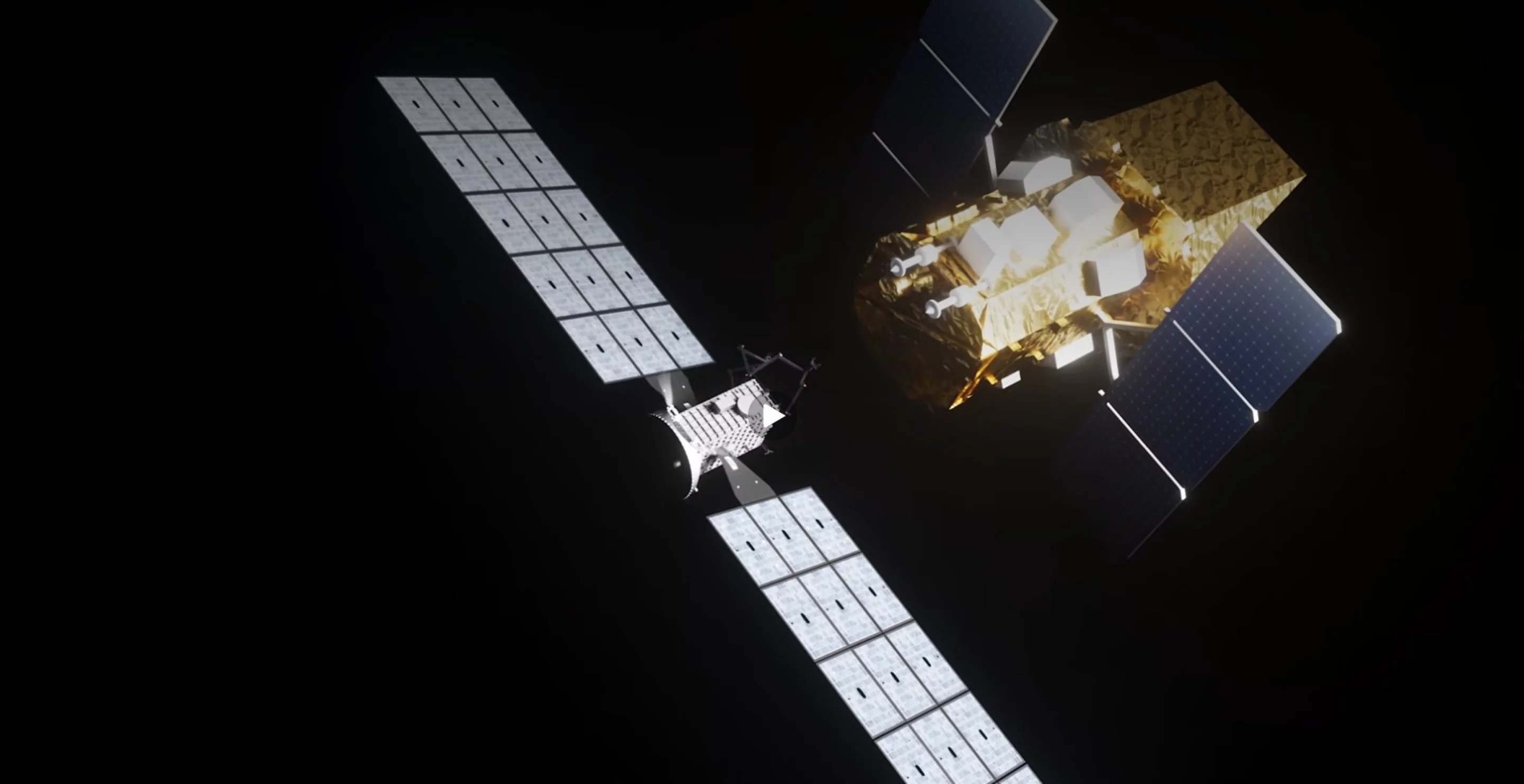
如果任务按计划完成,这将成为商业飞行器首次成功捕获一颗未做任何在轨服务预留的美国政府卫星,也是世界范围内首次尝试对完全“未准备”状态的科学卫星实施在轨捕获和轨道提升。 对商业航天产业而言,这意味着在轨救援、延寿、轨道清理等服务正从构想和试验阶段走向可规模化运营,其潜在市场价值不容小觑。
此次救援发射目前计划在2026年6月下旬进行。 诺斯罗普·格鲁曼飞马座火箭总工程师Steve Hollo表示,多年来飞马座一直承担着发射科学卫星的任务,而这次从夸贾林环礁起飞的快速响应任务,充分体现了该火箭在快速总装、测试和全球机动部署方面的能力,最新任务还对整套电子设备进行了全面升级,在传承既有技术积累的同时实现现代化改造。 他强调,飞马座不被固定在单一地面发射场的特点,使其在灵活性与响应速度方面具有其他运载工具难以比拟的优势,为这类时间敏感的卫星救援行动提供了关键支撑。