
意大利科技研究人员近日开发出一款受章鱼启发的软体机械臂,通过在“吸盘”中分布式集成传感与控制,实现类似章鱼触腕的本地“思考”和自主抓取能力,旨在用于复杂且难以预测的海底环境探索。
这项研究由意大利技术研究院(Italian Institute of Technology,IIT)生物仿生软体机器人实验室团队主导,他们从章鱼的神经系统结构中汲取灵感:章鱼虽然只有一个相对较小的中枢大脑,但约六成神经元分布在八条触腕之中,每只腕足都能就地处理信息并触发反射动作,例如独立完成抓捕猎物,无需等待大脑下达指令。研究团队尝试用硅胶和电子元件在机器人系统中复制这种分布式架构,使感知与动作紧密融合在柔性“身体”本身,而非依赖单一中央处理器。
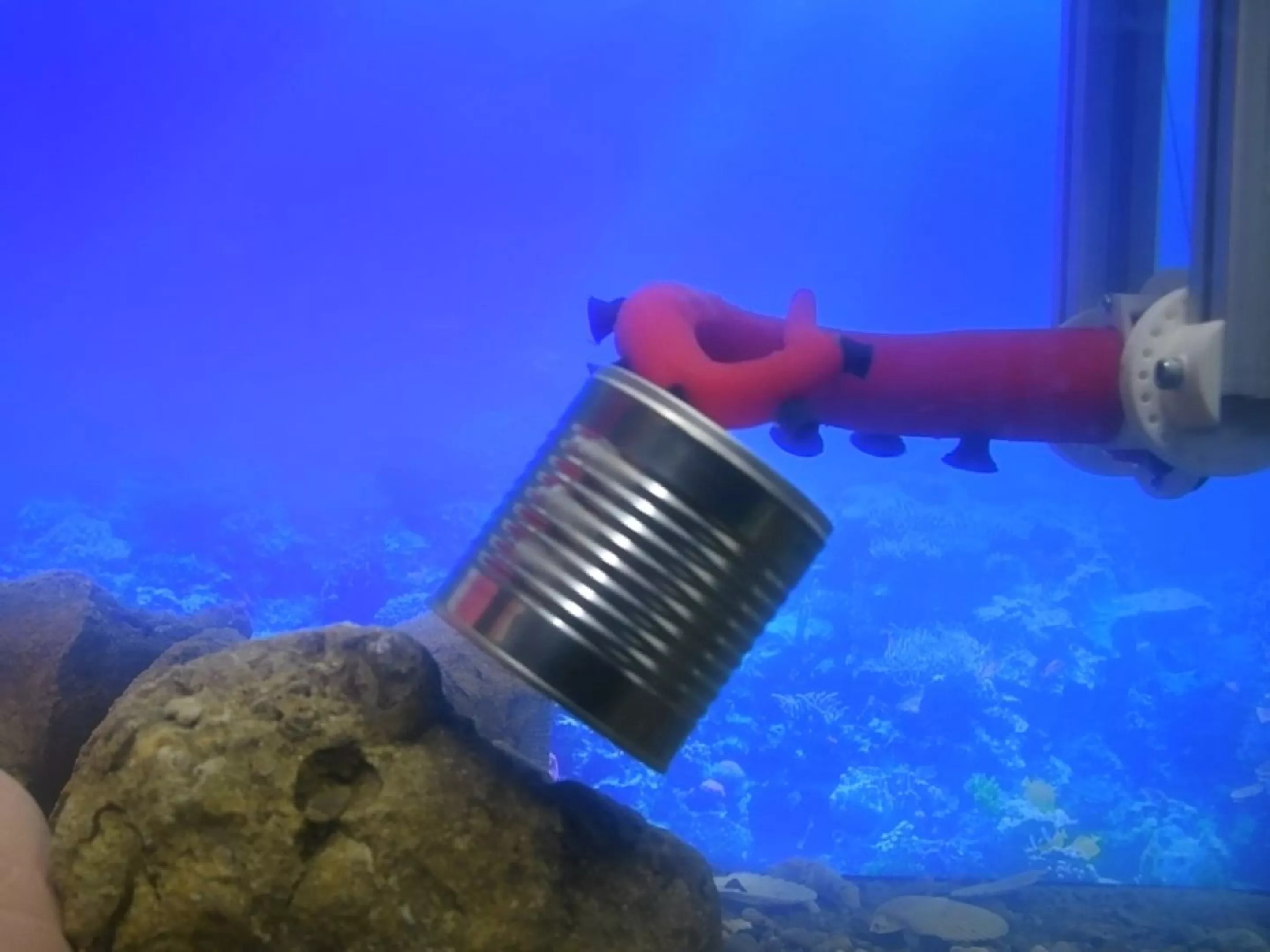
成果是一条长度约 41 厘米、基部直径约 4 厘米的软体机械臂,其外形和结构与章鱼触腕相似,从基部到末端装配了 10 个人工“吸盘”,尺寸逐渐变小。系统在设计上不依赖摄像头、外部计算机或集中式控制单元,而是把核心感知与初级决策能力全部下放到吸盘内部。该研究成果已发表于《Nature Machine Intelligence》期刊,IIT 也公开了面向大众的介绍材料。
每个人工吸盘内部集成了三个发光二极管和三个光电晶体管,构成微型光学传感系统,用来测量反射光的变化,相当于这条“机械触腕”的局部神经节点。当外物接触吸盘表面时,硅胶材质发生形变,反射光路径随之改变,系统据此判断是否发生接触、接触力度大小以及入射方向,由此形成三项关键感知数据。测试显示,系统的力敏感度约为每牛顿 400 毫伏,力测量误差约 0.1 牛顿,大致相当于几枚回形针的重量;方向识别最大误差低于 18 度,平均误差约 8 度,接近钟表相邻刻度之间的夹角。
控制架构方面,这条软体机械臂采用两级控制:第一级完全在本地执行——每个吸盘都有独立电路,一旦检测到接触就会立即触发吸附,不等待中央指令;第二级则位于较高层面,负责接收所有吸盘上传的数据,在约 4 秒时间窗口内综合分析目标位置与接触特征,并据此决定整体抓取策略,例如让机械臂向上或向下弯曲、或进行旋转,并在必要时覆盖局部吸盘的自主动作。研究团队表示,这种把传感与信号处理直接集成在吸盘中的方案,使得机械臂能够在没有集中控制的条件下实时、精确地对接触作出反应,并具备较好的可扩展性和鲁棒性,可在包括水下在内的复杂环境中运行。

目前所有实验均在水下进行。测试中,这条机械臂能够在运动过程中探测到玻璃瓶和玻璃杯等物体,对抓取对象的重量给出约 72.5 克的估计值,实际重量为 85 克,并能够操控处于不同角度的目标,包括一只人工制作的“海星”。在负载能力方面,该机械臂最大可举起约 500 克的物体,其传感性能在重复使用 300 个循环后仍保持稳定,显示出良好的耐用性。由于每个吸盘只向上位控制部分发送接触方向等提炼后的信息,而非完整原始数据,整套系统对带宽的需求大幅降低,从而可以轻松扩展到更多吸盘甚至多条触腕,而不会明显牺牲响应速度。
研究团队指出,该设计具有较强的模块化特性,吸盘的数量和布局可以根据不同任务灵活调整。潜在应用场景包括对海底管道、电缆和平台等水下基础设施进行检查,以及在刚性机器人无法到达的狭窄或复杂区域采集生物样本等。凭借柔性结构与自主决策能力结合,这种“章鱼式”机械臂有望在深海探测、海洋工程和水下维护等领域提供新的技术路径。
章鱼长期以来一直是机器人领域仿生设计的重要灵感源泉。早在 2017 年,德国自动化企业 Festo 就在汉诺威工业博览会上展示了 OctopusGripper,这是一种利用压缩空气驱动的硅胶触腕式抓取器,通过两排吸盘在充气时缠绕目标并完成抓取,但仍高度依赖外部气压控制和人工操控。近年来,英国布里斯托大学研究者则从另一维度切入,不再复制触腕形态,而是研究章鱼吸盘分泌的粘液,开发出一种由多层软体结构和仿生流体系统组成的新型吸盘,可模拟章鱼粘液在粗糙曲面上封堵缝隙的方式,从而抓握石块、木材等传统吸盘难以稳固附着的不规则物体。
更近一步,北京大学、新加坡国立大学、浙江大学和北京理工大学等机构的研究团队共同设计了 OUT-Robot 机械抓取系统,模拟头足类动物的抓握策略,使其能够在柔软与刚性状态之间快速切换,从而分拣和抓取不同形状、不同柔韧性和不同重量的物体。与这些此前的尝试相比,IIT 的新设计最大特点在于“自治”——它不仅仅能抓取,而是能够自行决定如何抓取。研究人员也强调,目前实验中所选用的物体几何形状相对简单,下一步计划包括用更复杂多样的形状和重量进行测试,并尝试引入类脑神经形态计算,使整个系统在信息处理方式上更接近真实章鱼的神经回路。