
美国佛罗里达大学团队近日宣布,他们开发出一套名为 BlueME 的新型水下通信系统,有望彻底改变自主式水下机器人之间以及与水面人员的通信方式。 研究人员表示,这一技术源自他们在体内无线植入设备方面的多年研究,思路是将人体这一“轻盐水环境”中的电磁传播经验迁移到海洋这一类似介质中。

目前,传统水下通信手段各有局限。无线电波在水下几乎派不上用场,在盐水中常规无线信号每米衰减约 1 至 10 分贝,通信距离往往仅有数英尺。 声学通信虽然可以实现更远距离传输,但会受到多普勒频移、多径干扰等因素影响,还可能对海洋生物造成噪声伤害。 光学系统在理想条件下带宽极高,却需要视线直达,一旦水体浑浊或光学窗口因生物附着而退化,性能便大打折扣。 综合来看,大多数水下机器人如今不是只能发送极短的状态“心跳包”,就是必须定期浮上海面上传任务数据,实时自主能力被严重限制。
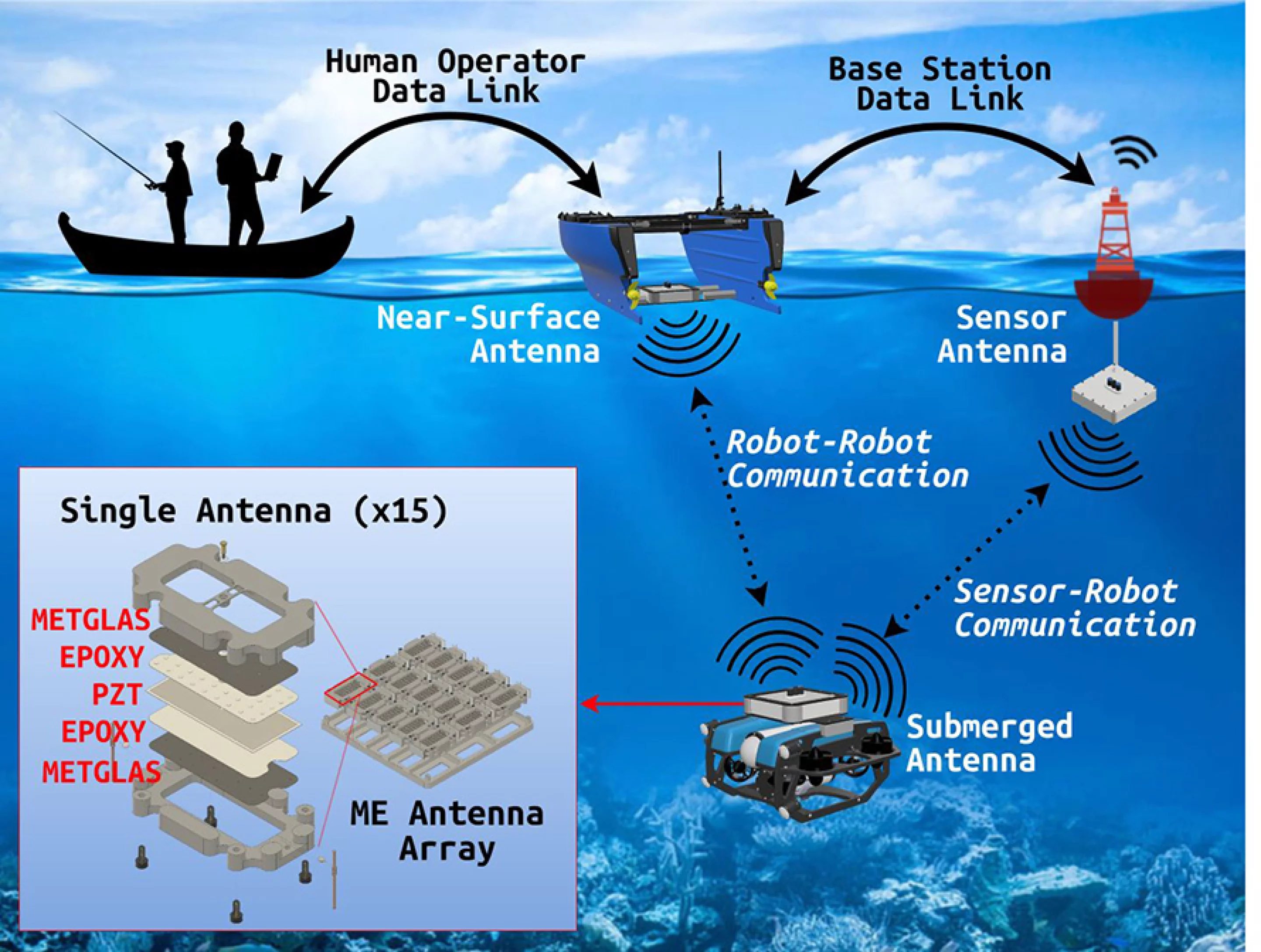
BlueME 系统正是针对这些瓶颈而生。该系统采用了磁电(Magnetoelectric,ME)天线,允许自主式水下航行器(AUV)在仅约 10 瓦功耗下,实现最远 730 米的数据通信,功率消耗低于一只家用 LED 灯泡。 研究团队介绍,在淡水环境中,BlueME 仅用 1 瓦功率即可在 200 米距离保持稳定通信,在盐水环境中则在不足 10 瓦的条件下实现 730 米信号检测,且不受水体浑浊度、障碍物或多径干扰影响。
这一系统的核心创新,是将磁致伸缩材料与压电陶瓷材料耦合,构成磁电天线。具体而言,外部磁场使名为 Metglas 的磁致伸缩层发生形变,这一机械形变再诱发相邻 PZT 压电层产生电压;反向操作则可完成信号发射。 得益于这种机电耦合设计,天线可以在约 35 至 36 kHz 的极低频段工作,同时体积远小于传统同频电天线。
完整的 BlueME 系统由 15 个此类天线构成 3×5 阵列,并封装在充油补偿的防水壳体内,以平衡深水环境下的巨大静水压力。 有趣的是,研究人员发现,这种磁电天线在入水后性能反而提升:在 36 kHz 下,信号波长在空气中约为 8,327 米,而在淡水中则被压缩至约 170 米,大幅提升了小型天线的辐射效率。 多天线联合发射使辐射功率相较单元天线放大约 225 倍,再配合匹配接收阵列,理论链路增益可达约 119 分贝。
该项目由亚当·哈利法(Adam Khalifa)和穆罕默德·贾希杜尔·伊斯兰(Md Jahidul Islam)联合负责,研究成果已被《IEEE 海洋工程学报》接收。 哈利法长期从事微型无线植入设备设计,他回忆说,有一天突然意识到人体和海洋在物理属性上的相似性:“我们的身体本质上就是轻盐水组成,这让我们开始用完全不同的方式思考海洋通信。”
在开放水域测试中,团队分别在佛罗里达州盖恩斯维尔的沃伯格湖(淡水)以及佛罗里达湾岸(盐水)开展实地试验,验证系统在不同水体条件下的表现。 实验显示,无论水体混浊程度如何,也不论是否存在障碍或多径反射,BlueME 都能维持稳定链路,这对于复杂近海环境下的水下作业具有现实意义。
在数据速率方面,BlueME 当前可实现约 1 Kb/s 至 100 Kb/s 的传输,远低于理想条件下光学系统可达到的吉比特级速度。 不过研究团队强调,该系统的设计目标从一开始就不是追求极高带宽,而是实现低功耗、远距离、稳定、对环境影响更小的双向链路。 “可以想象,机器人每 10 分钟向你回传一次任务进展,操作人员据此实时判断并适时调整任务,这对于提升水下作业的灵活性已经足够关键。”伊斯兰表示。
论文作者指出,这是磁电天线首次在室外环境完成实用级部署,同时也是迄今为止规模最大的甚低频/低频磁电天线阵列之一。 团队目前已提交临时专利申请,正寻求进一步资金支持,以改进硬件,并在全尺寸自主水下航行器平台上开展更多航次试验。 未来预期应用包括协同编队导航、海底地形测绘以及实时定位等关键场景。
“我们是在非常有限的初始资源条件下完成了现有成果。”哈利法强调,若未来能获得专门的工程化投入并实现更大规模部署,这一平台的潜力将远不止于当前展示的能力。 伊斯兰则形容当前阶段为“一个极具潜力产品的非常早期时期”,暗示 BlueME 在水下通信乃至海洋机器人领域的应用空间仍有巨大想象力。