

一段时间以来,我们一直在听说“双稳态”装置,这种装置可以在不消耗任何能量的情况下保持两种状态。双稳态装置是一种能够在两种稳定状态之间切换的张紧装置,但它们不需要电力来保持在任一状态。一种受植物种子荚启发的新型装置,采用机器人夹持器的形式,既坚固又易于激活。
金属发夹就是日常生活中很好的例子,这些物品可以通过接触来抓住物体。对于这些物品而言,通常我们不希望为了触发抓取固定动作而施加很大的压力 - 这意味着希望抓取器具有较低的“能量屏障”。
问题在于,能量势垒较低的双稳态装置通常没有足够的力量抓住它们所抓取的物体。换句话说,它们很可能会失去对重物或被外力拉动的物体的控制。
我们需要的是一个抓取器,它在最初抓取物体时具有较低的能量壁垒,但一旦抓住物体,其能量壁垒就会增加。当需要释放物体时,能量壁垒会再次降低。
考虑到这一要求,一组中国科学家研究了凤仙花的双稳态种子荚。

只要豆荚里的种子还未成熟,无法散播,豆荚就会保持较高的能量屏障,使其难以被触发。然而,一旦种子成熟,这种能量屏障就会减弱。因此,即使是雨滴的压力也足以使豆荚将种子射到周围的土壤上。
仿生双稳态夹持器示意图
中国中山大学的杨金钊博士、中山大学的吴嘉宁博士和大连理工大学的彭海军博士
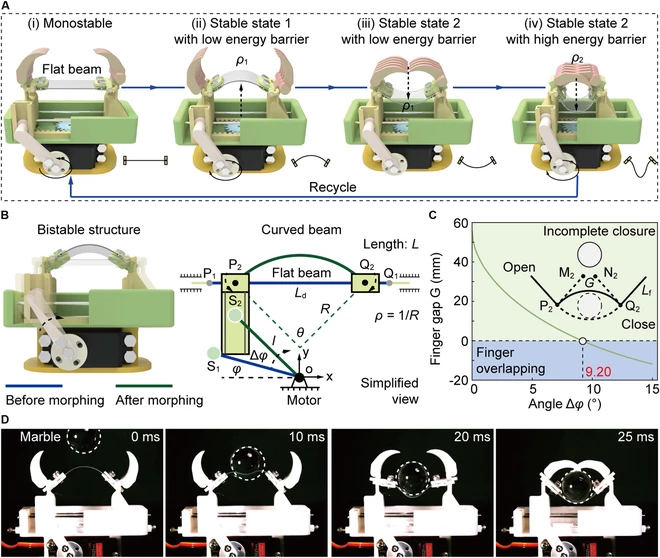
这款受凤仙花荚启发的抓取器包含两个用于抓取的“手指”,其底部分别连接到一根弹性梁的两端。连接手指和梁的两个夹钳又分别连接到一根由电机驱动的旋转轴上。
在夹持器的默认中性状态下,横梁是平的,不受拉力。然而,当需要抓取物体时,轴会旋转,导致横梁略微向上弯曲。这使它处于受拉的双稳态,能量势垒较低。
因此,当将夹持器放置在物体周围时 - 并且该物体压在向上弯曲的梁上 - 它会导致梁弹入向下弯曲的方向,同时将手指拉向物体周围。
一旦发生这种情况,轴就会向相反方向旋转,导致梁进一步向下弯曲。这会增加其能量屏障,从而增强并固定夹持器对物品的抓取力。
在该技术的演示中,其中一个夹持器被安装在一架四轴飞行器无人机的顶部,使无人机能够悬挂在树枝、栏杆等物体上,而无需悬停在原地。虽然横梁电机在调节横梁张力时会消耗一些电力,但保持对物体的抓握无需电力。而传统的夹持器则不会出现这种情况。

研究中使用的无人机
“我们的机器人夹爪响应速度快,交互力可编程,设计简洁高效,为下一代机器人系统开辟了新途径,”中山大学吴嘉宁博士说道。吴博士与大连理工大学彭海军博士共同领导了该项目。“这种独特的机制可以显著扩展机器人的功能,使其能够应用于各种领域。”
有关这项研究的论文最近发表在《研究》杂志上。